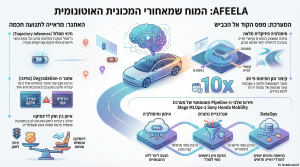

כשאנחנו מדברים על רכבים אוטונומיים, רובנו חושבים מיד על המצלמות והחיישנים ש"רואים" את הכביש. אבל הראייה היא רק חצי מהמשוואה – וזהו החלק ה"קל" יחסית. האתגר האמיתי, זה שמפריד בין רכב "חכם" לבין חוויית נהיגה אנושית, חלקה ובטוחה, נקרא Trajectory Inference (חיזוי ותכנון מסלול). זהו הרגע שבו הנתונים היבשים הופכים להחלטות הרות גורל בשבריר שנייה.
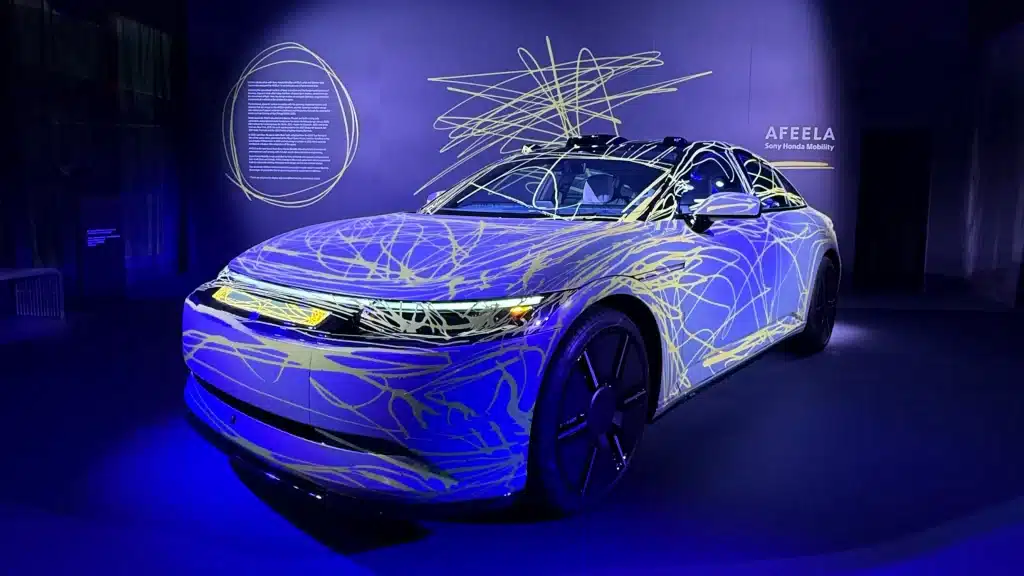
במאמר זה, נצלול עמוק אל מאחורי הקלעים של חטיבת הפיתוח ב-Sony Honda Mobility (או בקיצור SHM). המהנדסים טקהיקו הנאדה ורינטארו יאמאגוצ'י מובילים שם את פיתוח המוח שמנווט את ה-AFEELA – המיזם השאפתני שנוצר מהחיבור בין ענקית הטכנולוגיה סוני למומחית הרכב הונדה. מה שמייחד את הפרויקט הזה הוא לא רק העיצוב המרהיב, אלא הדרך שבה הבינה המלאכותית לומדת לנווט בעולם הפיזי.מה זה בכלל Trajectory Inference?
בעולם הרכב האוטונומי מקובל לדבר על מחזור ה-Sense-Think-Act. אם זיהוי האובייקטים (Perception) הוא ה"עיניים" של הרכב, תכנון המסלול הוא ה"מוח" המקבל את ההחלטות. המערכת מעבדת הררי נתונים המגיעים מחיישני LiDAR, מכ"מים ומצלמות 360 מעלות כדי להבין לא רק איפה נמצאים האובייקטים כרגע, אלא היכן הם יהיו בעוד שנייה מהיום. כדי להפוך את ה-AFEELA למציאות, הצוות מתמקד בשלושה צירים אסטרטגיים:- שיפור אלגוריתמי החיזוי: מעבר ממודלים גנריים לשילוב בין טכנולוגיות State-of-the-Art (SOTA) לבין מודולים קנייניים שפותחו בתוך החברה.
- סימולציות קצה: שימוש ב"תאומים דיגיטליים" להערכה מדויקת של פיזיקת הנסיעה (תאוצה צדית, קימורי פנייה וכוחות G).
- MLOps (Machine Learning Operations): בניית תשתית אוטומטית שמאפשרת למודל ללמוד, להיבחן ולהשתפר בקצב בלתי נתפס.
האתגר: נהיגה היא הרבה יותר מ"לא להתנגש"
פיתוח מערכת חיזוי מסלול מציב אתגרים שאינם קיימים בעולמות אחרים של בינה מלאכותית. בעוד שבזיהוי תמונה יש קשר יחסית ישיר בין קלט לפלט, בתכנון מסלול כל הכוונות, האילוצים והחוקים צריכים להתנקז לתוצר אחד ויחיד: הנתיב שהרכב יבצע בפועל.1. מורכבות התרחישים והלוקליזציה
המערכת צריכה לדעת לבצע פעולות בסיסיות כמו שמירה על נתיב או עצירה בקו עצירה, אך המבחן האמיתי הוא בתרחישי "קצה" (Edge Cases). דמיינו השתלבות בנתיב מהיר בכביש איילון בשעת עומס: המערכת צריכה להחליט מתי להאיץ כדי להיכנס לרווח צר, ומתי לוותר ולחכות. בעולם האקדמי, לעיתים קרובות מתעלמים מפרטים כמו "הגעה ליעד לפי ניווט תוך שמירה על נוחות הנוסע", אבל ב-AFEELA, אלו תכונות ליבה. המערכת חייבת לאזן בין החוק היבש (עצור בקו) לבין הדינמיקה האנושית (התקדמות איטית כדי לראות מעבר לעיקול).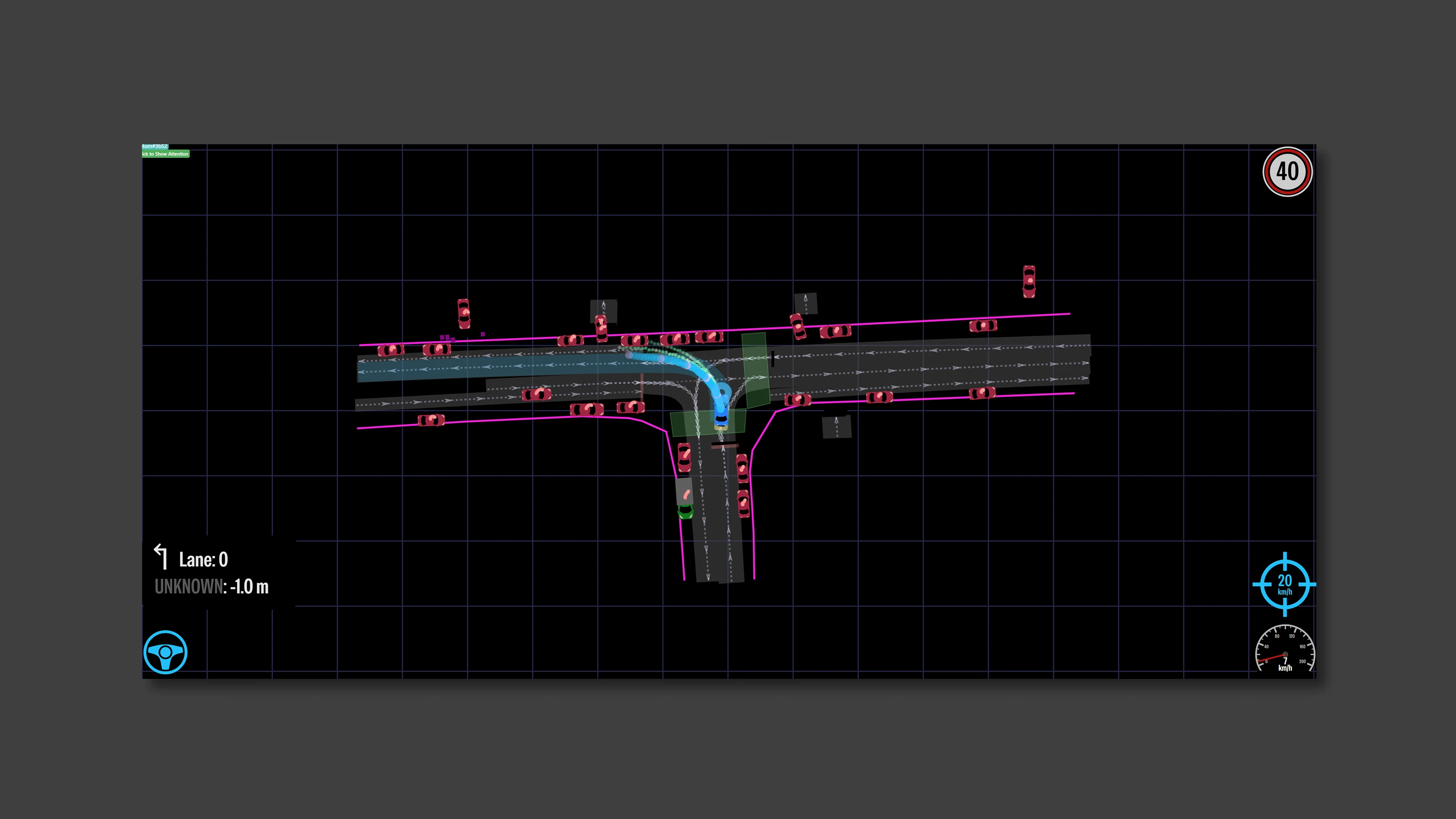
2. פרדוקס השיפור: סכנת ה"נסיגה" (Degradation)
זהו אולי האתגר המרתק ביותר עבור מהנדסי ML. בעולם הבינה המלאכותית, לעיתים קרובות כשאתה משפר משהו אחד, אתה פוגע במשהו אחר. המהנדסים של SHM גילו ששיפור הביצועים בתרחיש מסוים – למשל, עצירה חלקה יותר לפני מעבר חצייה – עלול לגרום באופן בלתי צפוי לפגיעה ביציבות הרכב בזמן נסיעה אחרי מכונית אחרת. התופעה הזו, המכונה "Degradation", קורית בגלל הפרעות בייצוג הפנימי של המודל. כדי להתגבר על כך, פותחה מערכת אוטומטית שמזהה "התאבכות" בין תכונות. היא מאפשרת לצוות לבודד את הגורם הבעייתי ולתקן אותו עוד בשלב האימון, מה שמונע מאיתנו לגלות את הטעות רק כשהרכב כבר על הכביש.סימולציות: כשפיזיקה פוגשת קוד
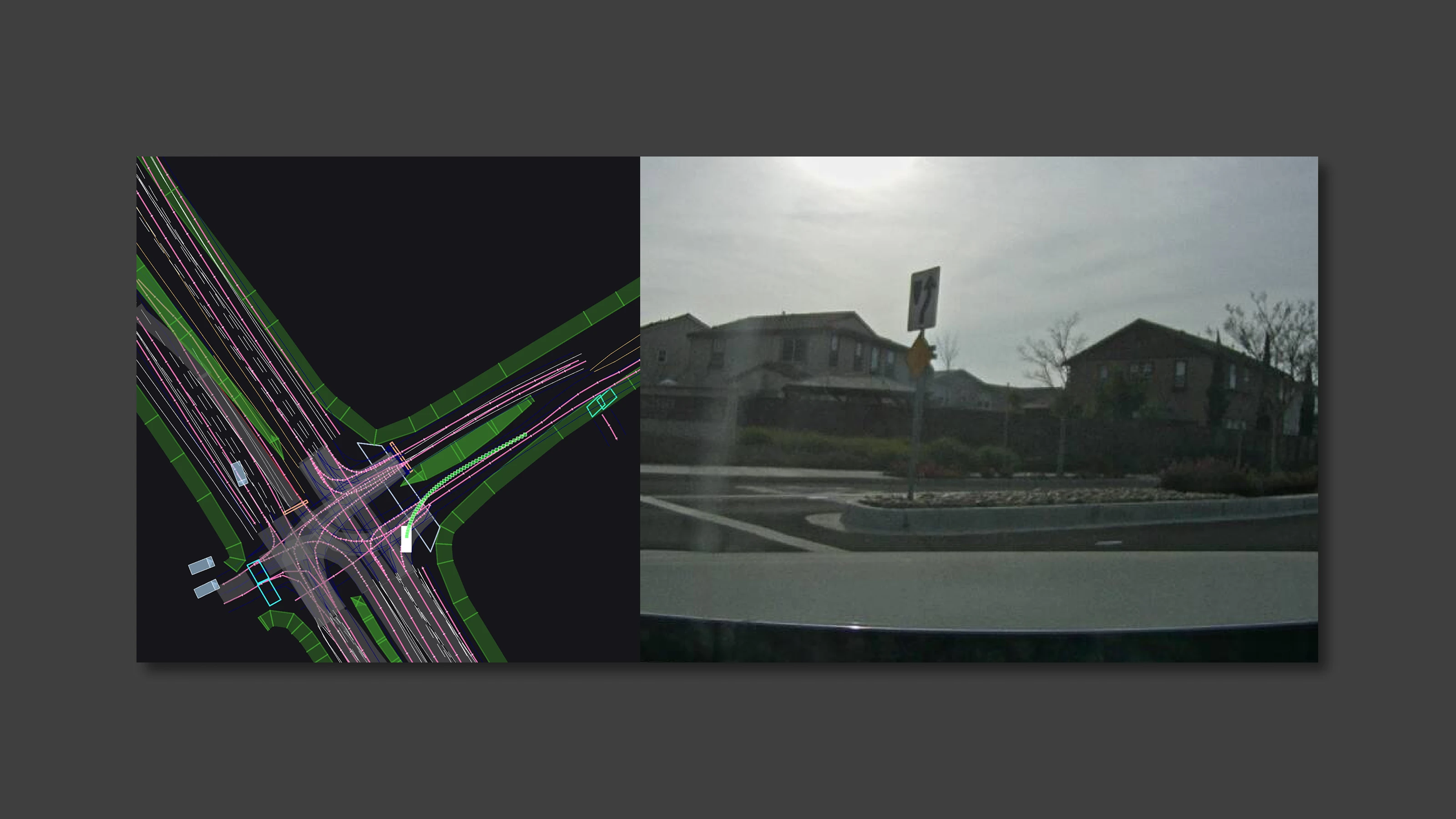
נסיעה חלקה עשויה להיראות פשוטה כשאנחנו מסתכלים על נקודה שזזה על מסך. אבל במציאות, כל שינוי קטן במסלול מתרגם לכוחות פיזיקליים שפועלים על גוף הרכב ועל הנוסעים. בדיקה שטחית של מסלול מתוכנן עשויה להראות קו חלק, אך ניתוח עמוק יותר של הנגזרות המתמטיות יגלה תאוצות לא ריאליות או קימורים חדים מדי שהיו גורמים לרכב אמיתי להחליק או לנוסעים להרגיש בחילה. במקום לשלוח עשרות מכוניות לכביש (תהליך יקר, איטי ומסוכן), ה-AFEELA עוברת "טירונות" בסביבת סימולציה. המערכת בוחנת כל מסלול לפי מספר צירים:- מדדי השלמה: האם הרכב הגיע ליעדו? האם הוא התנגש באובייקטים? מה היה מרחק הבטיחות המינימלי?
- מדדי נוחות ופיזיקה: האם התאוצה הצדית הייתה בטווח הסביר? האם הקימור של הפנייה תואם את זוויות ההיגוי האפשריות של הרכב?
- התאמה לתרחיש: הערכת הביצועים משתנה אם מדובר בנסיעה בכביש מהיר ישר לעומת ניווט בצומת עמוס בלב העיר.
MLOps: המנוע שמאיץ את החדשנות
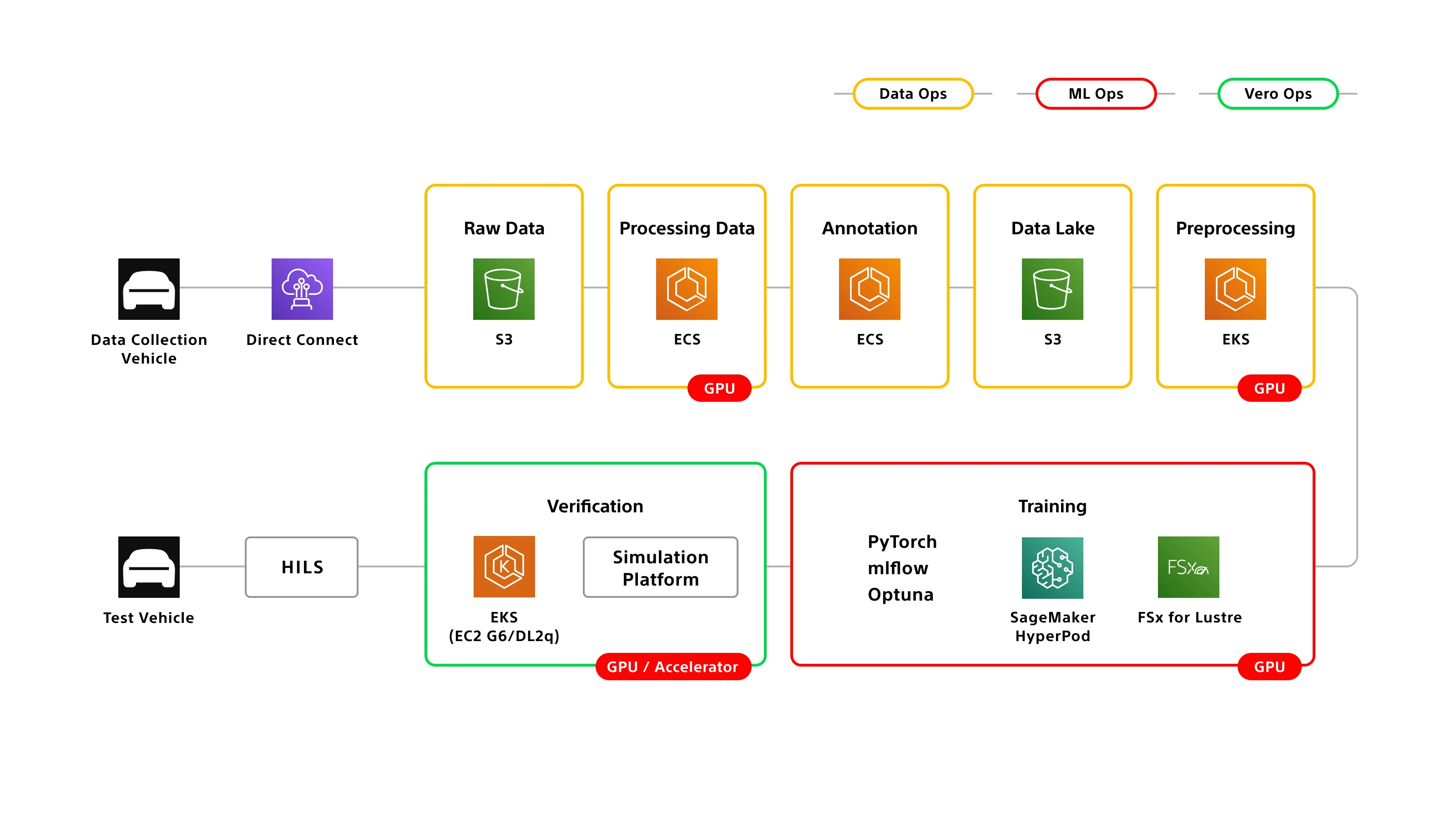
ההבדל בין סטארט-אפ קטן לענקית כמו סוני-הונדה טמון ביכולת לבצע סקייל (Scaling). אחד ההישגים הגדולים של הצוות הוא בניית ה-Pipeline האוטומטי. אם בעבר אימון מודל חדש והערכתו היו לוקחים שבועות של עבודה ידנית, היום התהליך קוצר ל-1/10 מזמנו המקורי.איך זה עובד בפועל?
ברגע שמהנדס מעדכן שורת קוד אחת ב-GitHub, מכונה שלמה מתחילה לעבוד:- אימון אוטומטי: המודל נבנה ומתאמן על ענן עוצמתי.
- הרצת סימולציות: אלפי תרחישי קצה מורצים על המודל החדש.
- אגרגציית נתונים: המערכת אוספת את כל המדדים (נוחות, בטיחות, דיוק) ומפיקה "ציון סופי".
- DataOps: כיוון שמערכות הראייה (Perception) משתפרות כל שבוע, ה-DataOps מוודא שכל נתוני החיישנים ההיסטוריים "מתורגמים" מחדש לפי המודלים האחרונים. זה מבטיח שהמוח המתכנן תמיד לומד על המידע האיכותי והעדכני ביותר שיש.
מהתיאוריה אל הכביש: התשוקה שבפיתוח
בסופו של דבר, מעבר לכל הגרפים והקוד, יש כאן סיפור אנושי. ב-Sony Honda Mobility לא רק בונים רכב; הם מנסים ליצור קטגוריה חדשה של "מרחב נייד". המהנדסים מעידים שהסיפוק הגדול ביותר מגיע מהרגע שבו התיאוריה הופכת לתנועה. יש משהו כמעט קסום בלראות רעיון ששורטט על דף הופך למציאות פיזית. היכולת לגשר על הפער שבין עולם הסימולציה לכביש האמיתי, ולראות את ה-AFEELA מבצעת פנייה מורכבת בדיוק כפי שהתכוונו – זו המהות של פריצת דרך טכנולוגית.